#include <stdio.h>#include <stdlib.h>#include <unistd.h>#include <math.h>#include <time.h>#include "const.h"#include "toolbox.h"
Include dependency graph for triangulation.c:

Go to the source code of this file.
Macros | |
| #define | AUTHOR "Vincent Pierlot" |
| #define | DEFAULT_PROGNAME "triangulation" |
| #define | EMAIL "vpierlot@gmail.com" |
| #define | VERSION "0.7" |
Functions | |
| int | main (int argc, char *argv[]) |
| int | test0 (tfloat xr, tfloat yr, tfloat or, tfloat x1, tfloat y1, tfloat x2, tfloat y2, tfloat x3, tfloat y3) |
| int | test1 (tfloat alpha1, tfloat alpha2, tfloat alpha3, tfloat x1, tfloat y1, tfloat x2, tfloat y2, tfloat x3, tfloat y3, int m) |
| int | test2 (tfloat xr, tfloat yr, tfloat or, tfloat x1, tfloat y1, tfloat x2, tfloat y2, tfloat x3, tfloat y3, int m) |
| int | test3 (tfloat x1, tfloat y1, tfloat x2, tfloat y2, tfloat x3, tfloat y3, int m, tfloat xstart, tfloat xend, tfloat ystart, tfloat yend, unsigned int n) |
| int | test4 (tfloat xr, tfloat yr, tfloat or, tfloat x1, tfloat y1, tfloat x2, tfloat y2, tfloat x3, tfloat y3, int m, tfloat sigmaAngle, tfloat sigmaBeacon, unsigned int n, int O) |
| int | test5 (tfloat x1, tfloat y1, tfloat x2, tfloat y2, tfloat x3, tfloat y3, int m, tfloat sigmaAngle, tfloat sigmaBeacon, unsigned int n, tfloat xstart, tfloat xend, tfloat ystart, tfloat yend, tfloat step, unsigned int map, int O, double thresh) |
| void | usage (const char *progName) |
| Print usage informations. More... | |
Detailed Description
- Date
- April 2013
- Version
- : 0.7
Three Object Triangulation algorithms implementation, simulation and benchmarking compile with: make run with: ./triangulation [options]
Definition in file triangulation.c.
Function Documentation
| void usage | ( | const char * | progName | ) |
Print usage informations.
Print usage informations, the only argument is <progName> and is typically argv[0]
- Parameters
-
progName
Definition at line 49 of file triangulation.c.
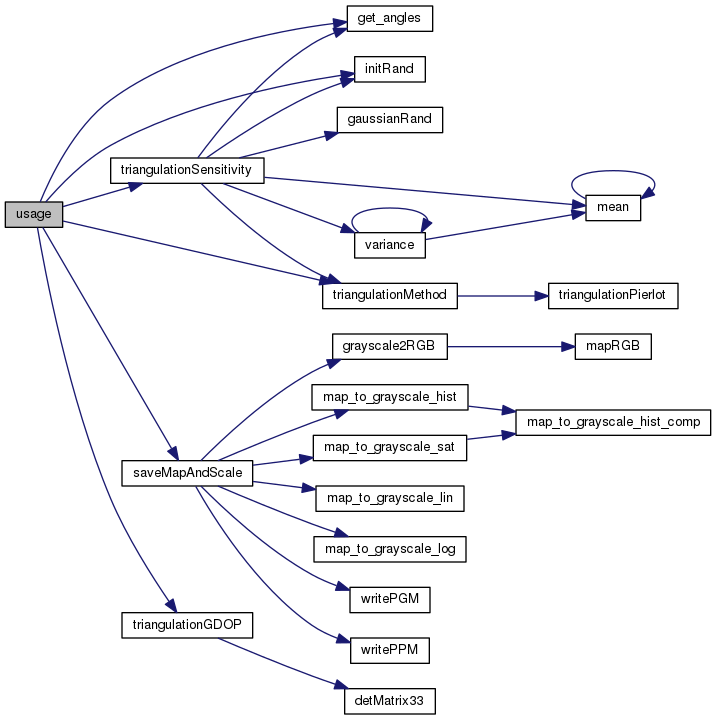
References get_angles(), initRand(), saveMapAndScale(), triangulationGDOP(), triangulationMethod(), and triangulationSensitivity().
61 " 2: gets angles from robot pose (x;y;o) and triangulates with measured angles. Displays angles and pose.\n"
62 " 3: runs triangulation method n times from random positions in the grid [-x,X]*[y,Y]. Displays execution time.\n"
64 " 5: runs triangulation sensitivity analysis for each point in the grid [-x,X]*[y,Y]. (see -O for output).\n"
65 " Writes PGM images \"map.pgm\" and \"scale.pgm\" in current directory. Displays step, min and max values.\n"
91 " 1: std deviation of position error, 2: std deviation of orientation error, 3: return value of method.\n"
95 " -A float Standard deviation of the gaussian noise applied to angles in [deg]. For tests 4, 5. (default=0.1)\n"
96 " -B float Standard deviation of the gaussian noise applied to beacons coordinates. For tests 4, 5. (default=0.0)\n"
97 " -n int Number of tests for the execution time and the sensitivity analysis. For tests 3, 4, 5. (default=100)\n"
Here is the call graph for this function: